早晨
早晨 📅 写于 2025-08-26 08:52:14 骑车子穿过一二三四五条街巷,8点钟的日头还挺大的。张扬又刺眼,追赶着我。 追逐着我,撵着我,我的车骑得超快,他必不能追上 地铁上看书 看到一句话 觉得非常好,记下来: 空冥的猜想可以负载任意的梦景,而实在的答案便会限定出真确的痛苦 呸呸呸 哪来这么多戏 好吧博君一笑 早安 诸君 或许并没有人看我发癫 哈哈哈 也不错 心情指数: ⭐⭐⭐⭐⭐天气: ☀️
电池模型复刻(上)
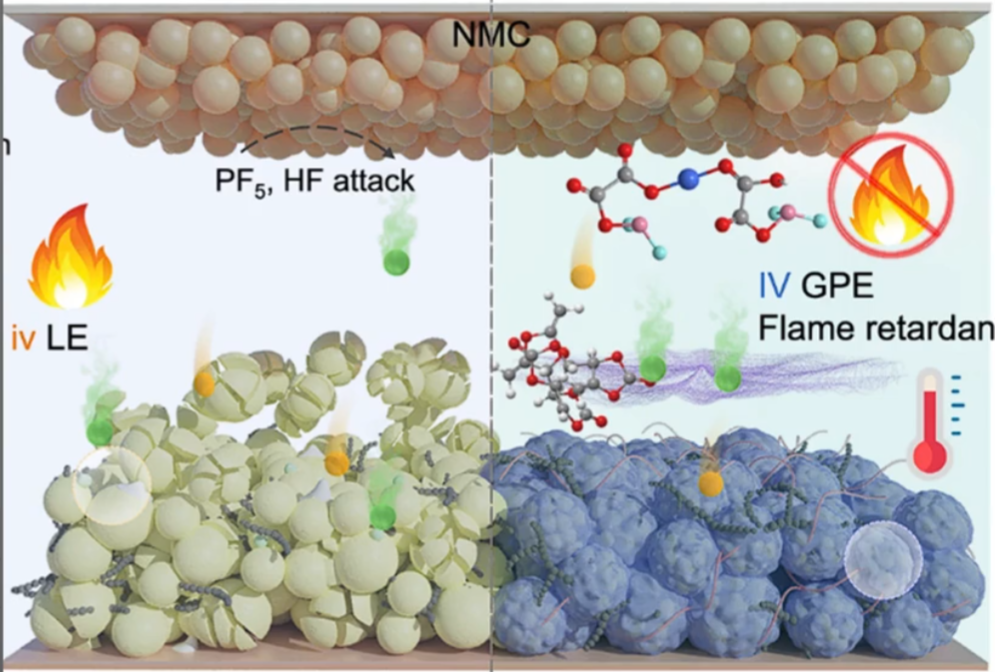
电池模型复刻(上)概述 nature communications An in-situ polymerization strategy for gel
polymer electrolyte Sil/Ni-rich lithium-ion
batteries 论文封面 本次先做一部分 环境要求 软件版本: Cinema 4D R20 或更高版本 系统要求: Windows 10/11 或 macOS 内存建议: 8GB 以上 显卡: 支持 OpenGL 的独立显卡 详细步骤步骤一: 建立立方体 步骤二:复制立方体 调整宽高大小位置 步骤三:创建球体并克隆 克隆选择对象 随机 步骤四:添加效果器退散 设置半径为球体半径 步骤五:添加灯光相机固定视角并渲染(由于教程的资源我没有,他的灯光效果我达不到因此渲染效果没有教程中好) 总结上半部分很简单,主要涉及一个推散的应用,其他的之前都用过。不过我看到视频博主用的灯光场景资源我都没有有点郁闷,看来可能需要找一些省的自己设置 参考资料 Cinema 4D 官方文档 C4D...

第二章习题选做
第二章习题选做这个题就比较多 估计得花几天 以上是第二节所有习题 能做的我会做没做不了的也会说明原因 但是感觉内容非常多 不晓得有没有必要全做呢 先列在这边 ,这篇会一直更新 直到做完

基本数学工具介绍
基本数学工具介绍此处简要介绍运算的应用场景和基本方法 后续学习会逐步详细展开1. 对应元素计算 (Element-wise Operations) 应用场景: 对图像进行逐像素的简单操作,例如调整亮度、对比度,或者将两幅图像进行叠加、混合等。它是许多图像增强和预处理的基础。 基本方法: 针对图像中每个对应位置的像素点进行独立的数学运算。例如,将一幅图像的所有像素值都加上一个常数可以增加其亮度;将两幅图像对应像素值相加,可以实现图像的融合或去噪(如多帧平均去噪)。 2. 线性运算与非线性运算 (Linear and Non-linear...

像素间的基本关系
像素间的基本关系如果两个像素点之间拥有四邻域或者八邻域的关系,那么称为4连接(N4P)、八连接(N8P) 、D连接(NDP) 1. 四邻域 即 四个黄色的像素是像素P的四邻域 2. 八邻域 即8个黄色像素是像素P的八邻域 3. D邻域 4. 连通性是描述区域和边界的重要概念,两个像素连通的两个必要条件是:1)两个像素位置是否相邻;2)两个像素的灰度值是否满足特定的相似性准则。 四连通 八连通 混合联通(m连通) 对于具有值V的像素p和q,如果:
I. q在集合N4(p)中,
Il.q在集合ND(p)中,并且N4(p)与N4(q)的交集为空(没有值V的像素)则称这两个像素是m邻接的,即4邻接和D邻接的混合
连通 像素间的邻接性 若p和q是4邻接,那么它们肯定是8邻接? 对 若p和q是8邻接,那么它们肯定是4邻接? 错 若p和q是4邻接,那么它们肯定是m邻接?对 若p和q是m邻接,那么它们肯定是4邻接?错 ...
图像的取样和量化
图像的取样和量化概述获取图像的方法有很多种,但所有的方法目的都相同,由感测的数据生成数字图像,多传感器的输出是连续的电压波形,这些波形的幅度和空间特性都与正被感测的物理现象相关。要产生一副数字图像,就需要把连续感测的数据转化为数字形式。这种转化包括两种处理:取样和量化 概念一幅连续图像f,将其转化为数字形式,她的X坐标与Y坐标是连续的,幅度也是连续的,要将函数数字化,就要对该函数的坐标和幅度进行取样 取样 对坐标值数字化称为取样 量化 对幅度值数字化称为量化 图解 上图可以看作一个取样和量化的过程 a. 是一幅连续图像,也可以用3D轮廓扫描仪的角度来看,a是一个物体 AB一维直线,在3D轮廓扫描仪的角度看是一条激光线b. b是图像AB所取的一条X坐标为宽度方向,Y为图像的亮度值的一个变化曲线。从3D相机的角度是Y为物体的高度值c. C是对X方向和Y方向进行取样和量化,也就是将变化曲线放入坐标系给与坐标数值,每一个坐标值对应一个亮度值。图像的角度看X单位是像素数,Y是亮度值。3D相机的角度看X是宽度数量值,Y是高度值。d....

图像的感知和获取
图像的感知和获取概述 图像由“照射”源和形成图像的“场景“元素对光能的反射或者吸收产生的 目前主要分为三种数字图像取图方式:单个成像传感器(a),条带图像传感器(b),阵列传感器(c) 单个成像传感器: 如上图传感器位于螺纹线杆上,传感器沿丝杆从头到尾运动形成一条直线为图片宽,胶片转动则形成图片的高度。通过精准控制机械运动可以获取高分辨率的照片。 条带传感器: 条带传感器有一条单个传感器组成,传感器数量即为图像宽度方向分辨率 多用于条带,滚动等方式成图,和线阵相机有些相似,但当前的线阵相机大多已经不是单线了,已经是一个阵列传感器了,但工作方式类似。线阵相机一次成像往往为多线也就是图像像素多几行,但他的帧率远超面阵相机。市面上速度达到100khz 的线阵相机比比皆是,往往成像宽度分辨率很高,轻松8k,在高速运动场景应用广泛 阵列传感器: 市面上的常见的工业、商业相机成像方式多为此类 一个简单的成像模型$$\begin{flalign} &\begin{aligned} &\text{用} f(x, y) \text{...

数字图像处理—前言
数字图像处理—前言 今天开始像梳理一下数字图像处理的基础内容。因为现在往往拿到手照片只想做yolo之类的不动脑筋的活,图像处理的基础内容日渐荒废几乎没怎么用了。深感不安,重新学习一下,连带着习题做一做 只是博客篇幅有限,一次只能更新大概一小节,每一小节包括理论,数学和代码 没有两三个小时感觉完不成。全书不包含绪论大概有90个小节,想尽快更新完的话得每天更新一节 花三个月完成。考虑到随时发生的懒惰,逃避,心情不好,心情太好,出门应酬,朋友邀约。把时间再放一倍 大概6个月。一想到这庞大的工作量顿时两眼一黑。 关于博客的发展其实还有很多想法。除了C4D想每周做一个模型可能相对轻松,但上周末加班到晚上又懒得做了。以后也想更新学习机器学习,深度学习,还有大模型的内容。但是心比天高落到实处往往半途而废。希望不要啊 饼姐赐予我力量!

散落的菱形十二面体
散落的菱形十二面体概述 刚体和碰撞体标签 随机效果器 置换变形器 环境要求 软件版本: Cinema 4D R20 或更高版本 系统要求: Windows 10/11 或 macOS 内存建议: 8GB 以上 显卡: 支持 OpenGL 的独立显卡 详细步骤步骤一:创建菱形12面体 创建立方体 塌陷 全选所有面右键挤压 坍塌 坍塌会将一个面坍塌成一个点 消除菱形中间的分段线 选择平滑着色断开 全选 然后反选 u+i 快捷键 右键倒角 选择实体倒角 20cm 细分曲面 步骤二:创建克隆 网格排列5x5 缩小立方体 使其两两不相连 结果 整体向上移动一定距离 因为地面要创建平面 克隆对象悬空 步骤三:添加凹凸平面 创建平面 添加置换,设置噪波 使平面起伏 步骤四:创建模拟标签 菱形12面体 刚体标签 选中克隆模型 右键选择刚体标签 平面添加碰撞体标签 需要说明R25默认刚体标签 独立元素已经是全部了 有些版本是默认关闭 关闭时 克隆对象是一个整体不会散落...

DNA螺旋
DNA螺旋概述 螺旋变形器 融球 环境要求 软件版本: Cinema 4D R20 或更高版本 系统要求: Windows 10/11 或 macOS 内存建议: 8GB 以上 显卡: 支持 OpenGL 的独立显卡 详细步骤本节可以说是两个模型,因此我们两个都讲一下 DNA双螺旋结构 四条线粒体分明的模型:步骤一:创建碱基对 创建一个圆柱 塌陷模型(转为可编辑对象) 快捷键C 删除中间段, 框选,勾选容差选择,不勾选的的话只能把目标全部框住才能选中,全部框中会把上下两个圆的边也删掉 所以要勾选容差选择 封顶 右键选择封闭多边形孔洞 然后点击两圆柱下底边和上顶边 圆周线 拉近 两圆柱 选择面 选择一个面之后按住shift加选 选择缩放按钮 点击纵轴坐标轴拉伸 添加材质 但上下两个圆柱颜色不同 所以材质也不同 在选择点模式下右键选择优化 不优化无法选中顶面 面模式下 先选中 一一个面 按快捷键u+w 选中整个上圆柱的所有面 将材质拖给选中目标 按快捷键 u+i 反选 同样把另一个材质给下圆柱 这样一个碱基对就完成了...