图像的感知和获取
图像的感知和获取
概述
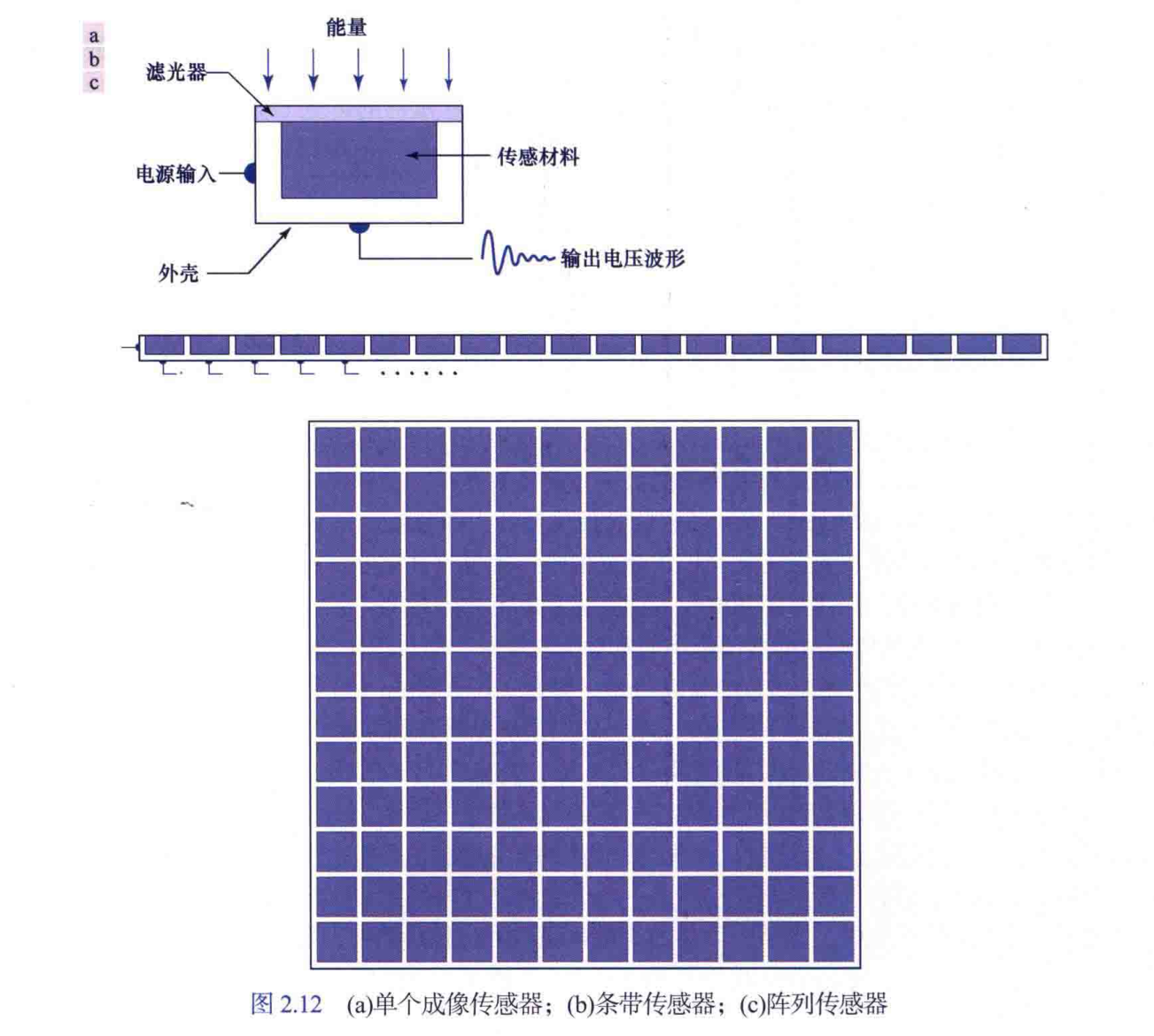
图像由“照射”源和形成图像的“场景“元素对光能的反射或者吸收产生的 目前主要分为三种数字图像取图方式:单个成像传感器(a),条带图像传感器(b),阵列传感器(c)
单个成像传感器:
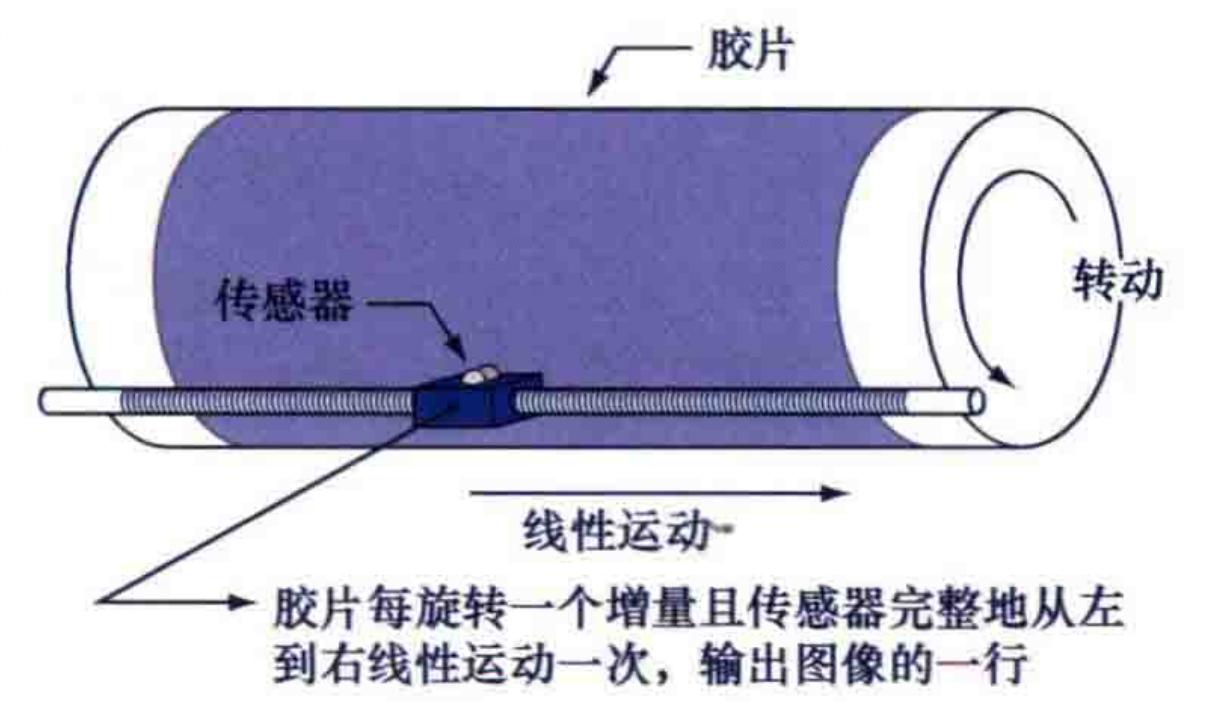
如上图传感器位于螺纹线杆上,传感器沿丝杆从头到尾运动形成一条直线为图片宽,胶片转动则形成图片的高度。通过精准控制机械运动可以获取高分辨率的照片。
条带传感器:
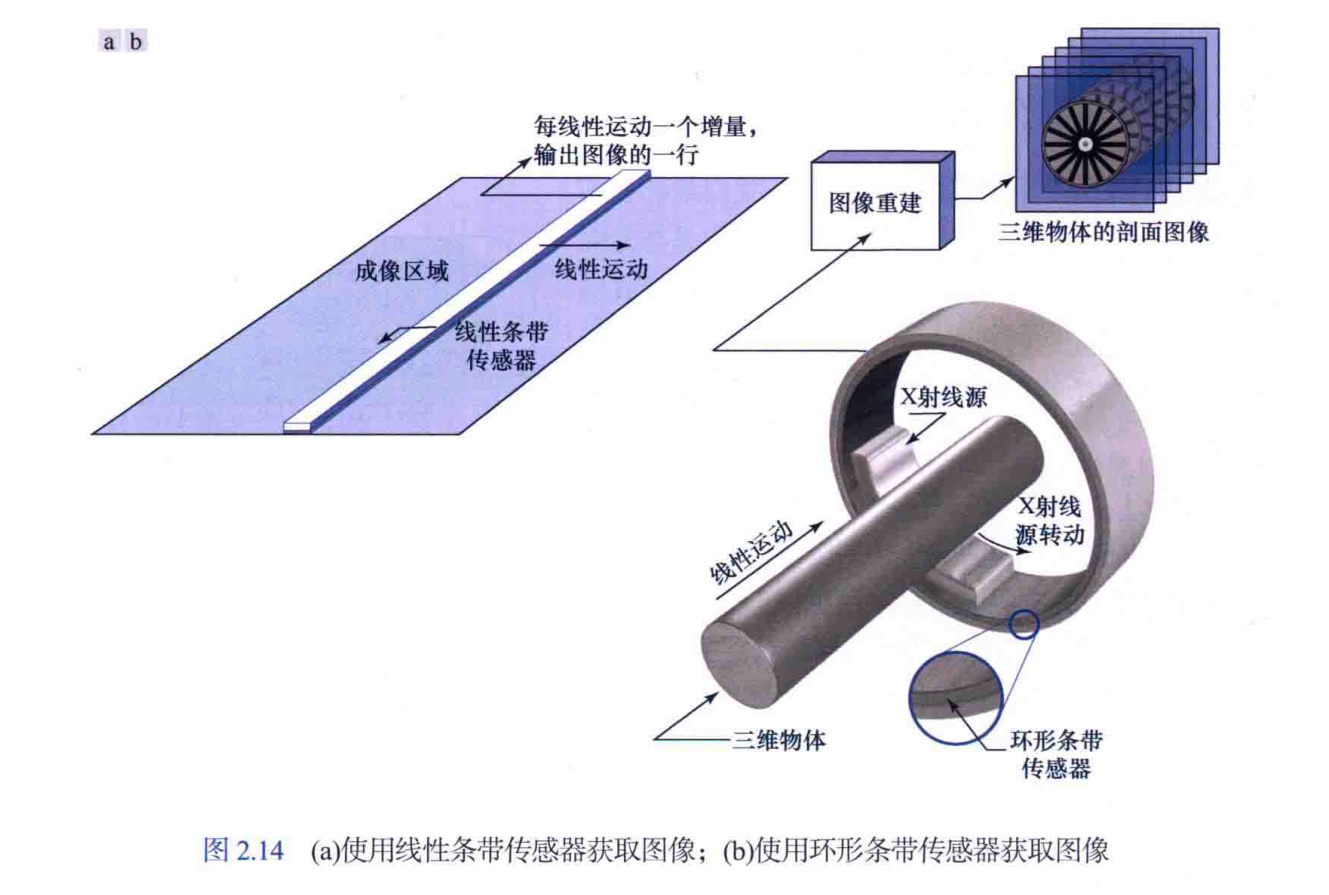
条带传感器有一条单个传感器组成,传感器数量即为图像宽度方向分辨率 多用于条带,滚动等方式成图,和线阵相机有些相似,但当前的线阵相机大多已经不是单线了,已经是一个阵列传感器了,但工作方式类似。线阵相机一次成像往往为多线也就是图像像素多几行,但他的帧率远超面阵相机。市面上速度达到100khz 的线阵相机比比皆是,往往成像宽度分辨率很高,轻松8k,在高速运动场景应用广泛
阵列传感器:
市面上的常见的工业、商业相机成像方式多为此类
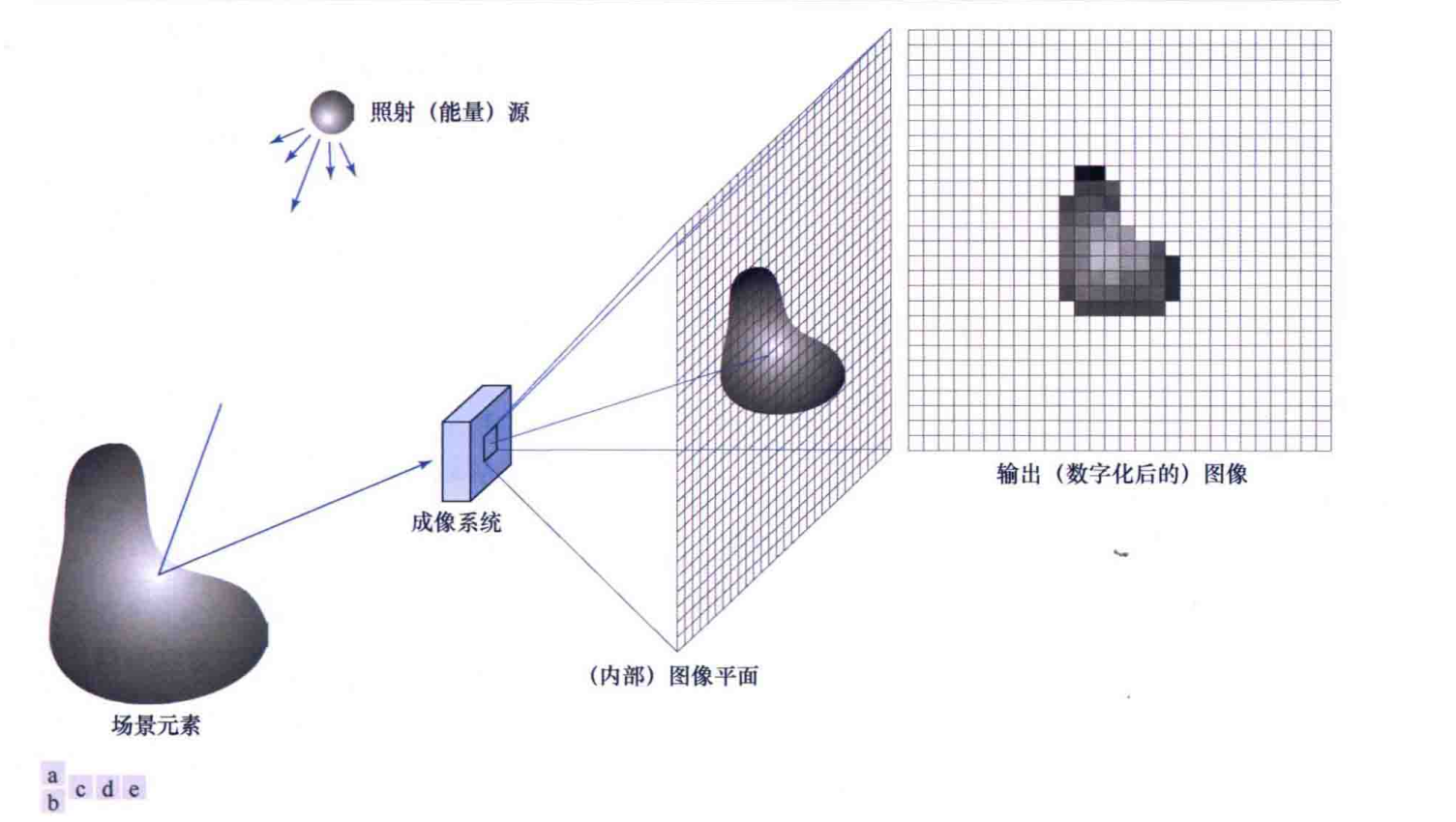
一个简单的成像模型
$$
\begin{flalign} &\begin{aligned} &\text{用} f(x, y) \text{ 的二维函数来表示图像在空间坐标}(x,y)\text{处的}f\text{值是一个标量,其物理意义由图像源决定} \ &\text{其值与物理源(如电磁波)辐射的能量成正比。因此} f(x,y) \text{一定是非负的和有限的:}\end{aligned}& \end{flalign}
$$
$$
0\le f(x,y) <\infty
$$
函数f(x,y)由两个分量表征:
- 入射被观察场景的光源照射量 被称为:入射分量 用i(x,y)表示
- 被场景中物体反射的照射量 被称为:反射分量 用r(x,y)表示
这两个函数的乘积形成f(x,y):
$$
f(x,y) = i(x,y)r(x,y) \quad 0\le i(x,y) \le \infty;\quad 0\le r(x,y) \le 1
$$
反射分量限制在0—1 之间 0表示全吸收,1表示全反射。i(x,y) 性质取决于照射源 。r(x,y) 性质取决于被成像物体的特性。在透射成像时(胸透X射线) 要用透射系数代替反射函数
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 这烦躁的秋天飘在我的头上!
相关推荐

2025-08-09
像素间的基本关系
像素间的基本关系如果两个像素点之间拥有四邻域或者八邻域的关系,那么称为4连接(N4P)、八连接(N8P) 、D连接(NDP) 1. 四邻域 即 四个黄色的像素是像素P的四邻域 2. 八邻域 即8个黄色像素是像素P的八邻域 3. D邻域 4. 连通性是描述区域和边界的重要概念,两个像素连通的两个必要条件是:1)两个像素位置是否相邻;2)两个像素的灰度值是否满足特定的相似性准则。 四连通 八连通 混合联通(m连通) 对于具有值V的像素p和q,如果:
I. q在集合N4(p)中,
Il.q在集合ND(p)中,并且N4(p)与N4(q)的交集为空(没有值V的像素)则称这两个像素是m邻接的,即4邻接和D邻接的混合
连通 像素间的邻接性 若p和q是4邻接,那么它们肯定是8邻接? 对 若p和q是8邻接,那么它们肯定是4邻接? 错 若p和q是4邻接,那么它们肯定是m邻接?对 若p和q是m邻接,那么它们肯定是4邻接?错 ...
2025-08-05
图像的取样和量化
图像的取样和量化概述获取图像的方法有很多种,但所有的方法目的都相同,由感测的数据生成数字图像,多传感器的输出是连续的电压波形,这些波形的幅度和空间特性都与正被感测的物理现象相关。要产生一副数字图像,就需要把连续感测的数据转化为数字形式。这种转化包括两种处理:取样和量化 概念一幅连续图像f,将其转化为数字形式,她的X坐标与Y坐标是连续的,幅度也是连续的,要将函数数字化,就要对该函数的坐标和幅度进行取样 取样 对坐标值数字化称为取样 量化 对幅度值数字化称为量化 图解 上图可以看作一个取样和量化的过程 a. 是一幅连续图像,也可以用3D轮廓扫描仪的角度来看,a是一个物体 AB一维直线,在3D轮廓扫描仪的角度看是一条激光线b. b是图像AB所取的一条X坐标为宽度方向,Y为图像的亮度值的一个变化曲线。从3D相机的角度是Y为物体的高度值c. C是对X方向和Y方向进行取样和量化,也就是将变化曲线放入坐标系给与坐标数值,每一个坐标值对应一个亮度值。图像的角度看X单位是像素数,Y是亮度值。3D相机的角度看X是宽度数量值,Y是高度值。d....

2025-08-09
基本数学工具介绍
基本数学工具介绍此处简要介绍运算的应用场景和基本方法 后续学习会逐步详细展开1. 对应元素计算 (Element-wise Operations) 应用场景: 对图像进行逐像素的简单操作,例如调整亮度、对比度,或者将两幅图像进行叠加、混合等。它是许多图像增强和预处理的基础。 基本方法: 针对图像中每个对应位置的像素点进行独立的数学运算。例如,将一幅图像的所有像素值都加上一个常数可以增加其亮度;将两幅图像对应像素值相加,可以实现图像的融合或去噪(如多帧平均去噪)。 2. 线性运算与非线性运算 (Linear and Non-linear...

2025-08-04
数字图像处理—前言
数字图像处理—前言 今天开始像梳理一下数字图像处理的基础内容。因为现在往往拿到手照片只想做yolo之类的不动脑筋的活,图像处理的基础内容日渐荒废几乎没怎么用了。深感不安,重新学习一下,连带着习题做一做 只是博客篇幅有限,一次只能更新大概一小节,每一小节包括理论,数学和代码 没有两三个小时感觉完不成。全书不包含绪论大概有90个小节,想尽快更新完的话得每天更新一节 花三个月完成。考虑到随时发生的懒惰,逃避,心情不好,心情太好,出门应酬,朋友邀约。把时间再放一倍 大概6个月。一想到这庞大的工作量顿时两眼一黑。 关于博客的发展其实还有很多想法。除了C4D想每周做一个模型可能相对轻松,但上周末加班到晚上又懒得做了。以后也想更新学习机器学习,深度学习,还有大模型的内容。但是心比天高落到实处往往半途而废。希望不要啊 饼姐赐予我力量!

2025-08-09
第二章习题选做
第二章习题选做这个题就比较多 估计得花几天 以上是第二节所有习题 能做的我会做没做不了的也会说明原因 但是感觉内容非常多 不晓得有没有必要全做呢 先列在这边 ,这篇会一直更新 直到做完
评论


.jpg)

